Henrik I Christensen
Henrik I Christensen
Home
Posts
Projects
Courses
Students
Publications
Contact
CV
Light
Dark
Automatic
CogRob
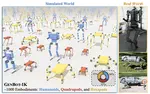
Towards Embodiment Scaling Laws in Robot Locomotion
Developing generalist agents that operate across diverse tasks, environments, and robot embodiments is a grand challenge in robotics …
Bo Ai
,
Liu Dai
,
Nico Bohlinger
,
Dichen Li
,
Tongzhou Mu
,
Zhanxin Wu
,
K. Fay
,
Henrik I Christensen
,
Jan Peters
,
Hao Su
PDF
Cite
Project
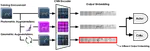
Towards Embodiment Scaling Laws in Robot Locomotion
Developing generalist agents that can operate across diverse tasks, environments, and robot embodiments is a grand challenge in …
Bo Ai
,
Liu Dai
,
Nico Bohlinger
,
Dichen Li
,
Tongzhou Mu
,
Zhanxin Wu
,
K. Fay
,
Henrik I Christensen
,
Jan Peters and Hao Su
PDF
Cite
Project
A Recipe for Unbounded Data Augmentation in Visual Reinforcement Learning
Q-learning algorithms are appealing for real-world applications due to their data-efficiency, but they are very prone to overfitting …
A. Almuzairee
,
N. Hansen
,
And H. I. Christensen
Cite
Project
Cite
×