Real-Time Online Mapping for Autonomous Driving : Addressing Sensor Generalization and Dynamic Map Updates in Campus Environments
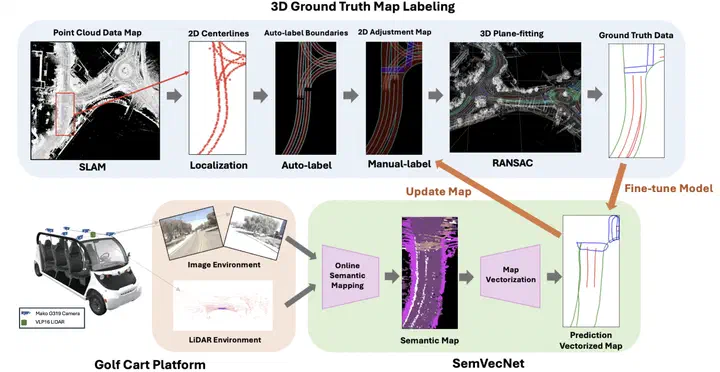 Overview of approach
Overview of approach
Abstract
High-definition (HD) maps are essential for autonomous driving systems, providing critical information such as road boundaries, lane dividers, and crosswalks to enable precise motion prediction and safe planning. However, traditional HD maps are typically human-labeled, making them expensive, time-consuming to create, and difficult to maintain as road conditions change. To address these challenges, online mapping task has emerged as a promising solution, leveraging open-source datasets and deep learning techniques to automate the mapping process. In this paper, we present a real-world application of online mapping implemented on a campus golf cart equipped with two front-view cameras and a LiDAR sensor. Our study focuses on three key challenges: (1) 3D campus map labeling (2) integrating the SemVecMap online mapping model into the golf cart and ensuring its generalization to the campus environment, and (3) continuously updating the HD map to reflect dynamic changes using the prediction map.