 Software pipeline for the autonomous scooter
Software pipeline for the autonomous scooter
Abstract
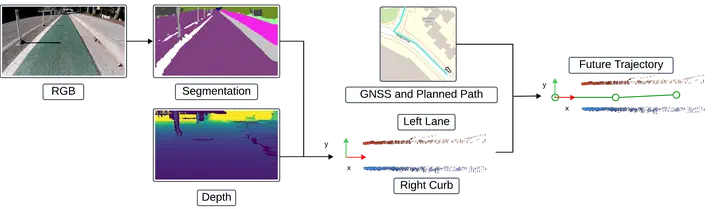
Rental electric scooters provide an effective last-mile mobility solution in spatially extensive environments. Nevertheless, existing services are constrained by labor-intensive management procedures: personnel must physically locate units that have become widely dispersed, retrieve them, and redeploy the fleet to anticipated areas of demand. The paper presents a lightweight, autonomous e-scooter platform designed to alleviate these labor overheads. The proposed system relies on an RGB-D camera and GNSS for real-time outdoor navigation, integrating semantic segmentation-based curb and lane detection with OpenStreetMap (OSM) data for robust path planning. Experimental evaluations conducted on the UC San Diego campus demonstrate the platform’s effectiveness in navigating diverse real-world conditions.