Henrik I Christensen
Henrik I Christensen
Home
Posts
Projects
Courses
Students
Publications
Contact
CV
Light
Dark
Automatic
1
SD++: Enhancing Standard Definition Maps by Incorporating Road Knowledge using LLMs
High-definition maps (HD maps) are detailed and informative maps capturing lane centerlines and road elements. Although very useful for …
Hitvarth Diwanji
,
Jing-Yan Liao
,
Akshar Tumu
,
Henrik I. Christensen
,
Marcell Vazquez-Chanlatte and Chikao Tsuchiya
Cite
Project
MapGS: Generalizable Pretraining and Data Augmentation for Online Mapping via Novel View Synthesis
Online mapping reduces the reliance of autonomous vehicles on high-definition (HD) maps, significantly enhancing scalability. However, …
Hengyuan Zhang
,
David Paz
,
Yuliang Guo
,
Xinyu Huang
,
Henrik Christensen and Liu Ren
Cite
Project
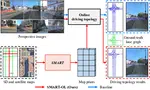
SMART: Advancing Scalable Map Priors for Driving Topology Reasoning
Topology reasoning is crucial for autonomous driving as it enables comprehensive understanding of connec- tivity and relationships …
Junjie Ye
,
David Paz
,
Hengyuan Zhang
,
Yuliang Guo
,
Xinyu Huang
,
Henrik Iskov Christensen
,
Yue Wang
,
Liu Ren
Cite
Project
Planning for Tabletop Object Rearrangement
Finding an high-quality solution for the tabletop object rearrangement planning is a challenging problem. Compared to determining a …
Jiaming Hu
,
Jan Szczekulski
,
Sudhansh Peddabomma
,
Henrik Iskov Christensen
PDF
Cite
Estimating Control Barriers from Offline Data
Learning-based control methods must satisfy safety requirements in order to be deployed in real-world robotics systems. Control …
Hongzhan Yu
,
Seth Farrell
,
Ryo Yoshimitsu
,
Zhizhen Qin
,
Henrik Christensen
,
Sicun Gao
PDF
Cite
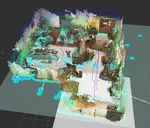
Autonomous Exploration and Mapping Payload Integrated on a Quadruped Robot
Use of a Boston Dynamics SPOT to scan a 3D environment through automatic exploration
Raheema
,
Julian; Hess
,
Michael; Provost
,
Raymond C; Bilinski
,
Mark; Christensen
,
Henrik Iskov
PDF
Cite
OSM vs HD Maps: Map Representations for Trajectory Prediction
High Definition (HD) Maps have long been favored for their precise depictions of static road elements. However, their accessibility …
Jing-Yan Liao*
,
Parth Jaydip Doshi
,
Zihan Zhang
,
David Paz
,
Henrik Iskov Christensen
Cite
Project
Enhancing Online Road Network Perception and Reasoning with Standard Definition Maps
Autonomous driving for urban and highway driving applications often requires High Definition (HD) maps to generate a navigation plan. …
Hengyuan Zhang
,
David Paz
,
Yuliang Guo
,
Arun Das
,
Xinyu Huang
,
Haug Karsten
,
Henrik Iskov Christensen
,
Liu Ren
Cite
Project
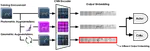
A Recipe for Unbounded Data Augmentation in Visual Reinforcement Learning
Q-learning algorithms are appealing for real-world applications due to their data-efficiency, but they are very prone to overfitting …
A. Almuzairee
,
N. Hansen
,
And H. I. Christensen
Cite
Project
Robust Surgical Tool Tracking with Pixel-based Probabilities for Projected Geometric Primitives
Controlling robotic manipulators via visual feedback requires a known coordinate frame transformation between the robot and the camera. …
Christopher D’Ambrosia
,
Florian Richter
,
Zih-Yun Chiu
,
Nikhil Shinde
,
Fei Liu
,
Henrik I. Christensen and Michael C. Yip
PDF
Cite
«
»
Cite
×